
Häzirki zaman ulag dolandyryşynda ýol we köpri ýüklerine gözegçilik etmek isleginiň artmagy bilen, Weigh-In-Motion (WIM) tehnologiýasy ýol hereketini dolandyrmak we infrastrukturany goramak üçin möhüm gural boldy. Enviko-nyň kwars datçik önümleri, ajaýyp öndürijiligi we ygtybarlylygy bilen WIM ulgamlarynda giňden ulanyldy.
Kwars agramy-hereket (WIM) algoritmleriniň ýörelgeleri
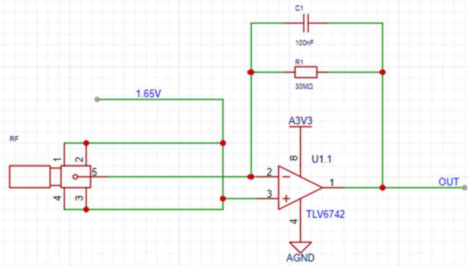
Kwars Weigh-In-Motion (WIM) ulgamynyň özeni, ýolda gurnalan kwars datçiklerini ulanyp, ulaglar tarapyndan ýoluň üstündäki basyşy hakyky wagtda ölçemekdir. Kwars datçikleri basyş signallaryny elektrik signallaryna öwürmek üçin piezoelektrik täsirini ulanýarlar. Bu elektrik signallary güýçlendirilýär, süzülýär we sanlaşdyrylýar, netijede ulagyň agramyny hasaplamak üçin ulanylýar.
WIM ulgamlarynda ulanylýan Enwiko-nyň kwars datçikleri ýokary duýgurlyga we giň ýygylyga jogap aýratynlyklaryna eýe bolup, ulaglaryň üstünden geçip barýarka bada-bat basyş üýtgemelerini takyk ele almaga mümkinçilik berýär. Mundan başga-da, kwars datçikleri dürli agyr şertlerde durnukly öndürijiligi saklap, ajaýyp temperatura durnuklylygy we uzak ömri bar.
Agram-hereket (WIM) algoritminiň ädimleri
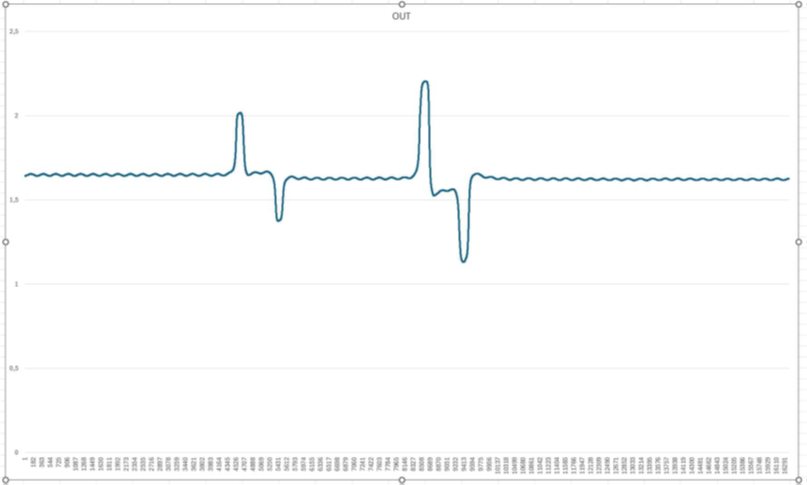
1.Signal almak: Kwars datçiklerini ulanyp, ulaglary geçip, bu signallary elektrik signallaryna öwürmek we maglumatlary ýygnamak ulgamyna geçirmek arkaly edilýän basyş signallaryny ele alyň.
2.Signal güýçlendirmek we süzmek: Şowhuny we päsgelçiligi aýyrmak, peýdaly agram maglumatlary saklamak üçin alnan elektrik signallaryny güýçlendiriň we süzüň.
3.Maglumatlary sanlaşdyrmak: Analog signallary soňraky gaýtadan işlemek we derňemek üçin sanly signallara öwüriň.
4.Esasy düzediş: Ölçeg takyklygyny üpjün edip, nol ýükli ofsetini aýyrmak üçin signallarda esasy düzedişleri ýerine ýetiriň.
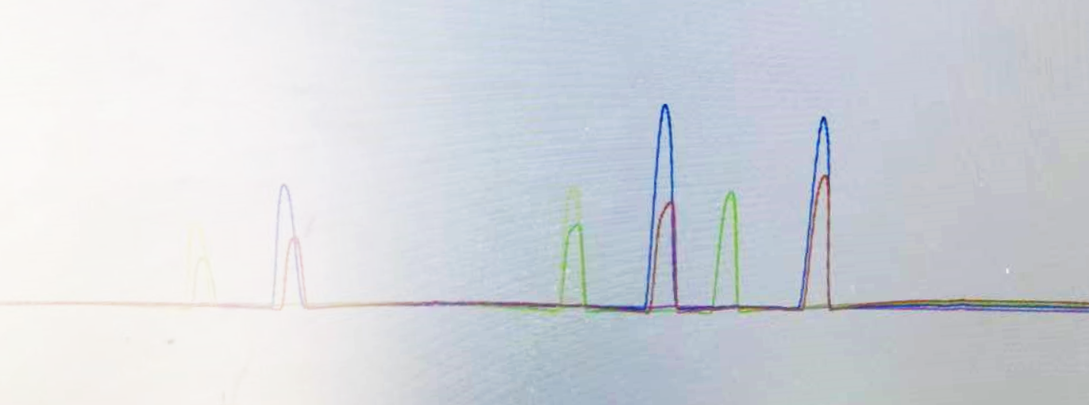
5.Integrasiýa gaýtadan işlemek: Awtoulagyň agramyna proporsional bolan umumy zarýady hasaplamak üçin wagtyň geçmegi bilen düzedilen signallary birleşdiriň.
6.Kalibrleme: Jemi zarýady hakyky agram bahalaryna öwürmek üçin öňünden kesgitlenen kalibrleme faktorlaryny ulanyň.
7.Agramy hasaplamak: Birnäçe datçik ulanylsa, ulagyň umumy agramyny almak üçin her datçikden agramlary jemläň.
Algoritmler we takyklyk arasyndaky gatnaşyk
Agram-hereket (WIM) ulgamynyň takyklygy esasan ulanylýan algoritmlere baglydyr. Enviko-nyň kwars datçikleri ýokary takyklykly signal almak we gaýtadan işlemek arkaly agram ölçemegiň takyklygyny üpjün edýär. Maglumatlary gaýtadan işlemegiň algoritmleriniň takyklygy we netijeliligi soňky agram netijelerine gönüden-göni täsir edýär. Ösen signallary gaýtadan işlemek we maglumatlary seljermek algoritmleri agram takyklygyny netijeli gowulaşdyryp we ölçeg ýalňyşlyklaryny azaldyp biler.
Hususan-da, signal almagyň takyklygy, ses süzgüçiniň täsiri, integrasiýa we kalibrleme prosesleriniň takyklygy agramyň takyklygyna täsir edýän esasy faktorlardyr. Enviko-nyň kwars datçikleri bu ugurlarda has ýokary bolup, ösen algoritmler we ýokary hilli enjamlar arkaly WIM ulgamlarynyň ýokary takyklygyny we ygtybarlylygyny üpjün edýär.
Gurmak we takyklyk arasyndaky gatnaşyk

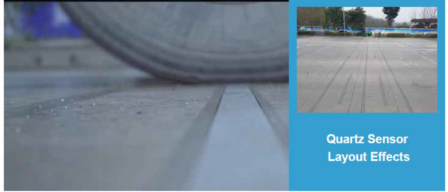
Kwars datçikleriniň gurnama ýagdaýy we usuly WIM ulgamynyň ölçeg takyklygyna ep-esli derejede täsir edýär. Maksimum basyş üýtgemeleriniň takyk tutulmagyny üpjün etmek üçin ulagyň ýolundaky esasy ýerlerde datçikler oturdylmalydyr. Gurmak wagtynda, nädogry gurnama sebäpli ölçeg ýalňyşlyklaryndan gaça durmak üçin datçikler bilen ýoluň üstünde ýakyn aragatnaşyk saklamaly.
Mundan başga-da, temperatura, çyglylyk we ýeriň tekizligi ýaly daşky gurşaw faktorlary datçigiň işleýşine we ölçeg takyklygyna täsir edip biler. Enwikonyň kwars datçikleri ajaýyp temperatura durnuklylygyna garamazdan, takyk ölçeg netijelerini üpjün etmek üçin aşa temperatura şertlerinde degişli kompensasiýa çäreleri zerur.
Sensorlaryň uzak möhletli durnukly işlemegini üpjün etmek üçin yzygiderli kalibrleme we tehniki hyzmat etmek hem möhümdir. Professional gurnama we tehniki hyzmat arkaly, Enviko kwars datçikleriniň öndürijiligini takyk we ygtybarly dinamiki agram (WIM) maglumatlary bilen üpjün edip bolýar.
Netije
Enwikonyň kwars datçikleriniň dinamiki agram (WIM) ulgamlarynda ulanylmagy, ýol hereketini dolandyrmak we infrastrukturany goramak üçin netijeli we ygtybarly çözgütleri hödürleýär. Takyk signal almak, öňdebaryjy algoritm gaýtadan işlemek we hünär gurmak we tehniki hyzmat etmek arkaly kwars dinamiki agram (WIM) ulgamlary ulagyň agramyna real wagt gözegçilik we dolandyryşy amala aşyryp biler, ýol we köprüleriň könelmegini we ýyrtylmagyny netijeli azaldyp, ýol hereketiniň netijeliligini ýokarlandyryp biler. Üznüksiz tehnologiki ösüşler bilen, Enviko kwars datçikleri WIM ulgamlarynda barha möhüm rol oýnap, akylly transportyň ösmegi üçin berk binýady üpjün eder.

“Enviko Technology Co., Ltd.”
E-mail: info@enviko-tech.com
https://www.envikotech.com
Çengdu ofisi: No. 2004, 1-nji bölüm, 2-nji bina, 8 158, Tianfu 4-nji köçesi, ýokary tehnologiýa zolagy, Çengdu
Gonkong ofisi: 8F, Çung Wang binasy, Gonkongyň San Wui köçesi, 251
Iş wagty: Awgust-07-2024




